
Anuncios
Proceda paso a paso, explicando detalladamente cada paso con sus propias palabras.
Proceda paso a paso, explicando detalladamente cada paso con sus propias palabras, la asignación correspondiente a su número de cédula.
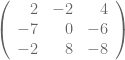
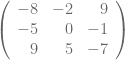
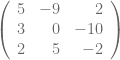
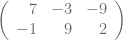
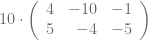
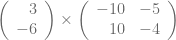
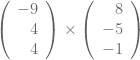
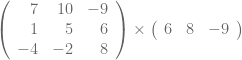
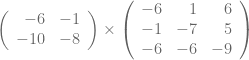
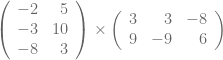
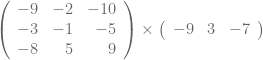
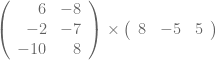
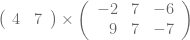
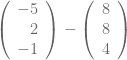
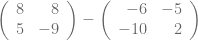
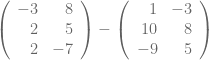
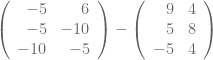
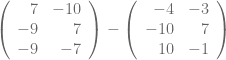
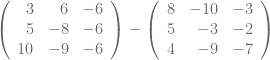
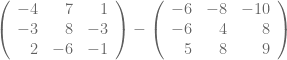
Calcule el determinante de la matriz indicada.
1. 2.
2.  3.
3.  4.
4.  5.
5.  6.
6.  7.
7.  8.
8.  9.
9.  10.
10.  11.
11.  12.
12.  13.
13.  14.
14.  15.
15.  16.
16. 
Anuncios
 2.
2.  3.
3.  4.
4.  5.
5.  6.
6.  7.
7.  8.
8.  9.
9.  10.
10.  11.
11.  12.
12.  13.
13.  14.
14.  15.
15.  16.
16. 
 2.
2.  3.
3.  4.
4.  5.
5.  6.
6.  7.
7.  8.
8.  9.
9.  10.
10.  11.
11.  12.
12.  13.
13.  14.
14.  15.
15.  16.
16. 
 2.
2.  3.
3.  4.
4.  5.
5.  6.
6.  7.
7.  8.
8.  9.
9.  10.
10.  11.
11.  12.
12.  13.
13.  14.
14.  15.
15.  16.
16.  17.
17.  18.
18.  19.
19.  20.
20.  21.
21.  22.
22.  23.
23.  24.
24.  25.
25.  26.
26.  27.
27.  28.
28.  29.
29.  30.
30.  31.
31.  32.
32. 
 2.
2.  3.
3.  4.
4.  5.
5.  6.
6.  7.
7.  8.
8.  9.
9.  10.
10.  11.
11.  12.
12.  13.
13.  14.
14.  15.
15.  16.
16.  17.
17.  18.
18.  19.
19.  20.
20.  21.
21.  22.
22.  23.
23.  24.
24.  25.
25.  26.
26.  27.
27.  28.
28.  29.
29.  30.
30.  31.
31.  32.
32. 

Debe estar conectado para enviar un comentario.