Calcule la solución de las siguientes ecuaciones lineales usando en cada paso los Axiomas Algebraicos de los Números Reales, explique cada paso con sus propias palabras.

Calcule la solución de las siguientes ecuaciones lineales usando en cada paso los Axiomas Algebraicos de los Números Reales, explique cada paso con sus propias palabras.





































Considerando las ecuaciones diferenciales ordinarias lineales, particularmente, el caso no-homogéneo con coeficiente constante de la forma
Sabemos calcular la solución de este tipo de ecuaciones. Veremos que este tipo de ecuaciones se puede usar para describir la relación entre la oferta y la demanda en una economía.
Considerando que el equilibrio del mercado se consigue cuando las oferta es igual a la demanda, nos propondremos determinar la trayectoria que debe seguir el precio a través del tiempo para que el mercado se mantenga siempre en equilibrio.
También pudiera interesarte
Suponga que las funciones de demanda y oferta de un producto son las siguientes:
Sabiendo que el equilibrio de mercado se consigue cuando 
Es decir, si 


Consideraremos que el precio en un mercado cambia de acuerdo a las fuerzas relativas de demanda y para simplicidad, supongamos que la tasa de cambio de precios con respecto al tiempo 

Sustituyendo las funciones 

Esta es una ecuación diferencial ordinaria lineal de primer orden que se puede calcular usando el factor integrante 
Si consideremos la condición inicial 
Por lo tanto, la solución que estamos buscando viene dada por
Notemos ahora que 


Referencias
Zhang, W.-B. (2005). DIFFERENTIAL EQUATIONS, BIFURCATIONS, AND CHAOS IN ECONOMICS (Vol. 68). World Scientific.
Considerando las ecuaciones diferenciales ordinarias lineales de primer orden, particularmente, el caso homogéneo con coeficiente constante de la forma
Sabemos calcular la solución de este tipo de ecuaciones, así que veremos que este tipo de ecuaciones se puede usar para describir la relación de la inversión anual con la capacidad productiva en una economía, a través del Modelo de Harrod-Domar.
El caso ideal es cuando toda la inversión es aprovechada para obtener la mayor producción posible, esto se conoce como equilibro, así que nos propondremos a determinar cuál es la trayectoria de la inversión a lo largo del tiempo para la cual el sistema siempre se encuentra en equilibrio.
También pudiera interesarte
El sistema en el que se basa este modelo está construido sobre la siguiente hipótesis: Si 

Teniendo en cuenta que el efecto de la demanda en un cambio de
Los agentes involucrados tomarán una porción de la producción (esta cantidad es predecible) con el propósito de acumular capital, esta proporción es llamada propensión marginal al ahorro y la denotaremos con 
El efecto de la capacidad de inversión se refleja en el cambio de la tasas de producción potencial que la economía puede producir. La tasa de capacidad-capital está definida por
donde 


Después de un sencillo despeje en ésta última igualdad, tenemos que
y derivando respecto a
ya que un incremento en el capital es igual a la capacidad de inversión, es decir, 
Por otra parte, definimos equilibrio como una situación en la que la capacidad productiva es totalmente aprovechada, es decir,
entonces, al considerar un equilibrio, existe un balance entre los cambios respectivos en la capacidad productiva y demanda agregada, esto es,
Teniendo en cuenta todas estas definiciones, nos preguntamos: ¿Qué trayectoria de tiempo de la inversión 


Calculamos la solución de esta ecuación diferencial con la condición inicial 
Al considerar el valor inicial
Por lo tanto la trayectoria requerida viene dada por 
Esto implica que para mantener el balance entre la capacidad productiva y la demanda sobre el tiempo, la tasa de flujo de inversión debe crecer a una tasa exponencial de 
Sustituyendo 
Al considerar el valor inicial 
Finalmente, tenemos que 

Al considerar la forma estándar de una ecuación diferencial ordinaria lineal no-homogénea
entonces el factor integrante correspondiente será
Calcule la función 



 ;
; 



 ;
; 



 ;
; 



 ;
; 

![-6y' - \frac{7y}{x} = -2\sqrt[3]{x}](https://s0.wp.com/latex.php?latex=-6y%27+-+%5Cfrac%7B7y%7D%7Bx%7D+%3D+-2%5Csqrt%5B3%5D%7Bx%7D&bg=ffffff&fg=5e5e5e&s=0&c=20201002)
![-20y' + \frac{40y}{-x+6} = -4\sqrt[5]{x^4}](https://s0.wp.com/latex.php?latex=-20y%27+%2B+%5Cfrac%7B40y%7D%7B-x%2B6%7D+%3D+-4%5Csqrt%5B5%5D%7Bx%5E4%7D&bg=ffffff&fg=5e5e5e&s=0&c=20201002)
![-9y' - \frac{y}{7x-1} = 3\sqrt[4]{7x-1}](https://s0.wp.com/latex.php?latex=-9y%27+-+%5Cfrac%7By%7D%7B7x-1%7D+%3D+3%5Csqrt%5B4%5D%7B7x-1%7D&bg=ffffff&fg=5e5e5e&s=0&c=20201002) ;
; 



 ;
; También pudiera interesarte
Una vez que hemos planteado un sistema de ecuaciones lineales con 

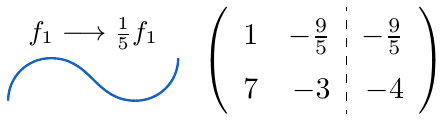
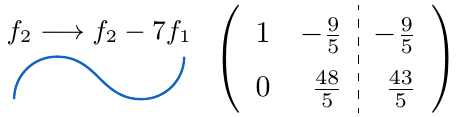
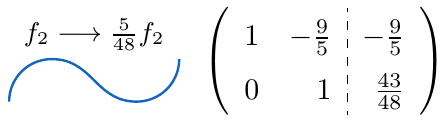
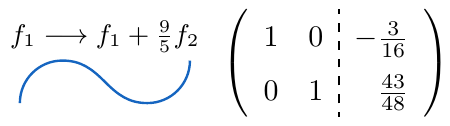
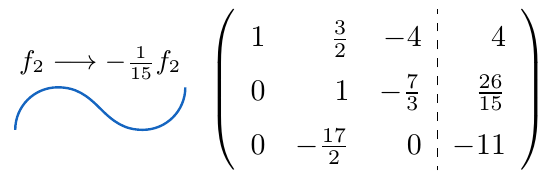
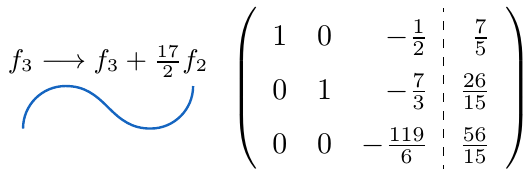
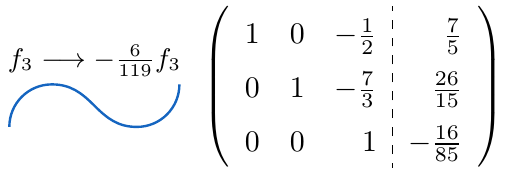
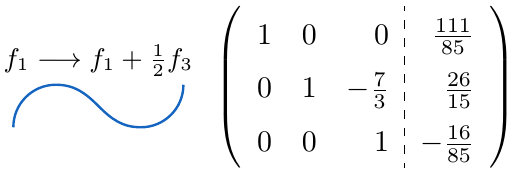
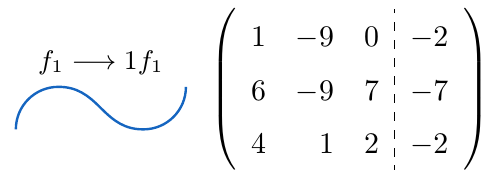
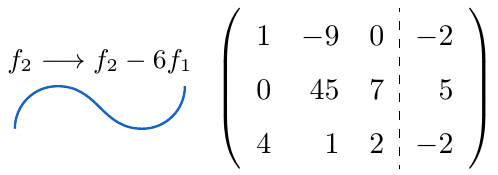
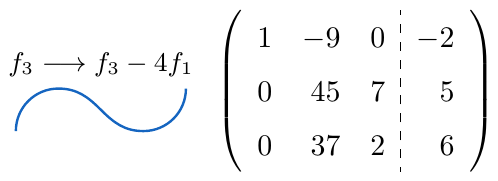
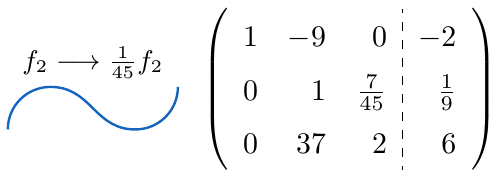
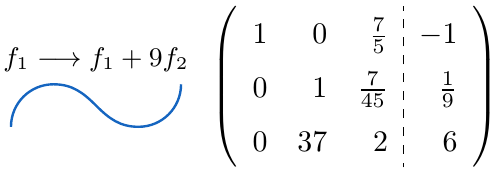
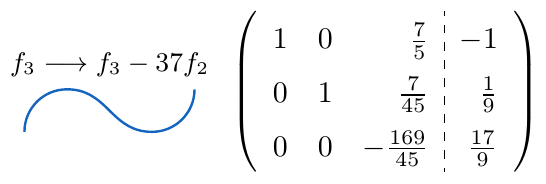
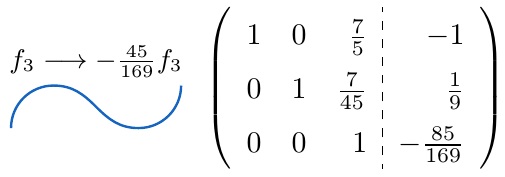
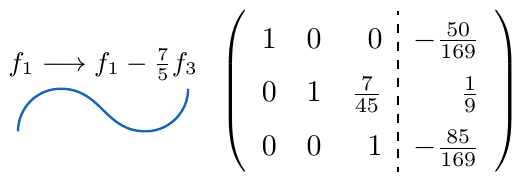
Podemos establecer un método que nos permite calcular la solución de un sistema de ecuaciones lineales usando las operaciones elementales por filas para reducir la matriz a una matriz escalonada reducida, pero a su vez, con las mismas operaciones transformar la matriz de términos independientes en la solución que estamos buscando.
Formalmente, si 

Veamos con algunos ejemplos como calcular la solución de sistemas de ecuaciones lineales usando este método.
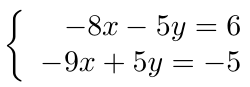
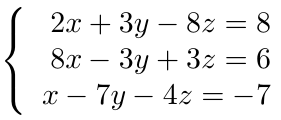
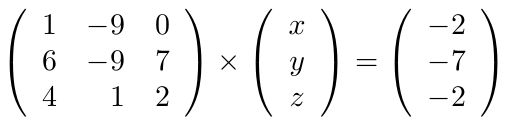
Considerando el sistemas de ecuaciones con 

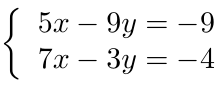
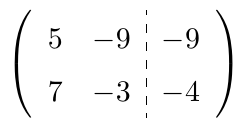
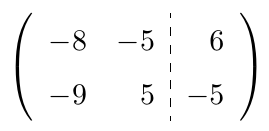
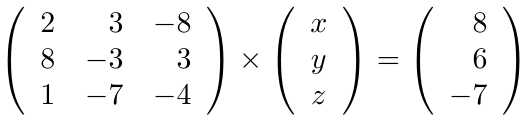
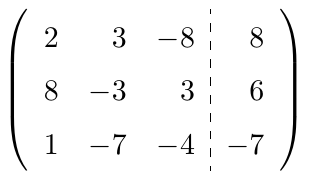
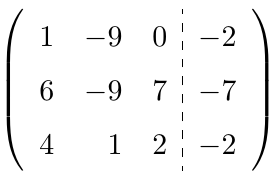
Este sistema de ecuaciones lineales se puede expresar de forma matricial, de la siguiente manera:

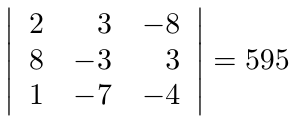
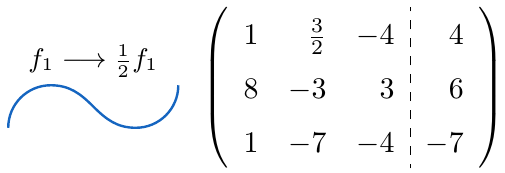
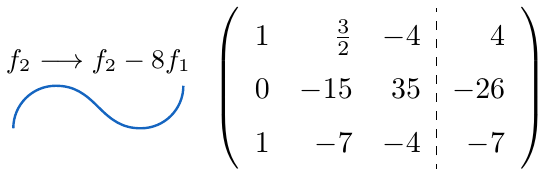
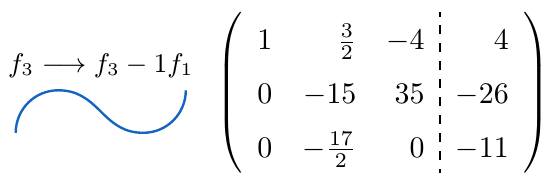
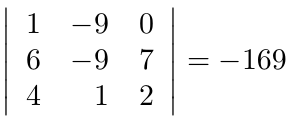
Empezamos calculando el determinante de la matriz
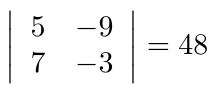
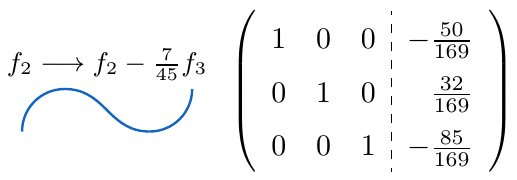
Habiendo verificado que el determinante de la matriz
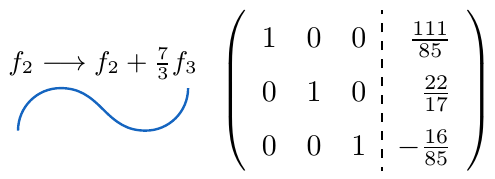
Finalmente, la solución del sistema de ecuaciones está dada por: 

Considerando el sistemas de ecuaciones con
Este sistema de ecuaciones lineales se puede expresar de forma matricial, de la siguiente manera:

Empezamos calculando el determinante de la matriz

Habiendo verificado que el determinante de la matriz



Finalmente, la solución del sistema de ecuaciones está dada por: 

Considerando el sistemas de ecuaciones con 
Este sistema de ecuaciones lineales se puede expresar de forma matricial, de la siguiente manera:
Empezamos calculando el determinante de la matriz
Habiendo verificado que el determinante de la matriz

Finalmente, la solución del sistema de ecuaciones está dada por: 


Considerando el sistemas de ecuaciones con

Este sistema de ecuaciones lineales se puede expresar de forma matricial, de la siguiente manera:
Empezamos calculando el determinante de la matriz
Habiendo verificado que el determinante de la matriz
Finalmente, la solución del sistema de ecuaciones está dada por: 


Nota: Queda de parte del lector verificar que los valores calculados son en efecto, la solución de los sistemas de ecuaciones planteados. Para esto debe sustituir los valores en cada una de las ecuaciones y verificar que se cumple la igualdad.












































Debe estar conectado para enviar un comentario.